

Automatic Emergency Braking Sensor Configuration Effect on the Detection of U.S. Pedestrians
Abstract
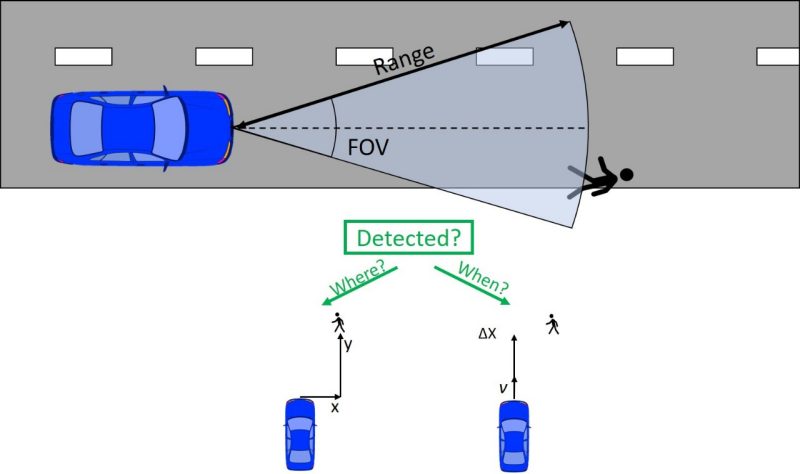
Automatic Emergency braking (AEB) systems have the potential to mitigate or avoid vehicle-pedestrian crashes, if they can detect pedestrians with sufficient time to take evasive action. The objective of this study was to examine the effect of AEB sensor field-of-view (FOV) and range on the detection of pedestrians in real-world US vehicle-pedestrian crashes. This study utilized vehicle-pedestrian crashes from the Pedestrian Crash Data Study (PCDS). PCDS crash scene diagrams were manually digitized in AutoCAD and reconstructed to create vehicle and pedestrian trajectories. The crashes were then simulated with various AEB sensor systems to estimate each sensor system’s pedestrian detection ability. Sensor FOV was varied from ±10° to ±90° and sensor range was varied from 20m to 100m. Sensor range had a negligible effect on the estimated pedestrian detection capability, but a longer range did increase the length of time the pedestrian was visible. Wider sensor FOV resulted in higher pedestrian detection capability. The narrowest sensor could potentially detect an estimated 58% of pedestrians whereas the widest sensor was estimated to detect up to 99% of the pedestrians.
Haus, SH, Sherony, R, Gabler, HC, "Automatic Emergency Braking Sensor Configuration Effect on the Detection of U.S. Pedestrians." IRCOBI Conference Proceedings. 2021. Remote.