

Differential Benefit of Sensor System Field-of-View and Range in Pedestrian Automated Emergency Braking Systems
Abstract
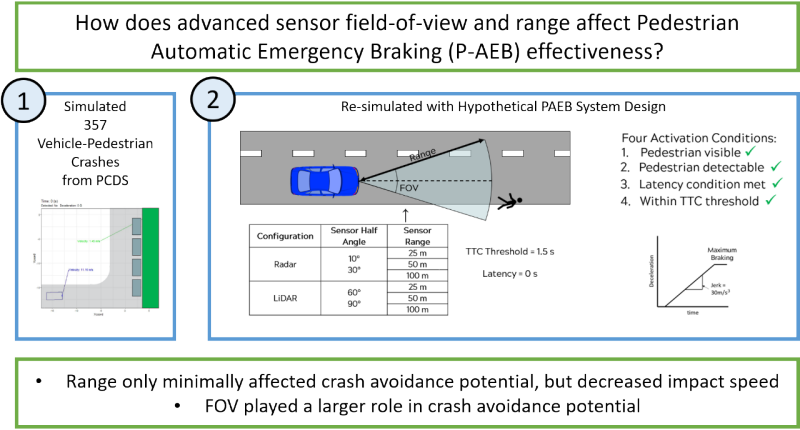
Current Pedestrian Automatic Emergency Braking (P-AEB) systems often use a combination of radar and cameras to detect pedestrians and automatically apply braking to prevent or mitigate an impending collision. However, these current sensor systems might have a restricted field-of-view (FOV) which may not detect all pedestrians. LiDAR can have a wider FOV that may substantially help improve detection. The objective of this study was to determine the influence of FOV and range on the effectiveness of P-AEB systems to determine the potential benefit of advanced sensors.This study utilized vehicle-pedestrian crashes from the Pedestrian Crash Data Study (PCDS) to calculate pre-crash pedestrian and vehicle trajectories. A computational model was then applied to simulate the crash with a hypothetical P-AEB system. The model was designed to be able to vary the system’s field-of-view (FOV), range, time-to-collision of activation, and system latency. In this study we estimated how the FOV and range of advanced sensors could affect P-AEB system effectiveness at avoiding crashes and reducing impact speed. Sensor range was varied from 25 - 100 m and sensor FOV was varied from ±10° to ±90°. Sensors simulated with a range of 50 m or greater performed only approximately 1% better than with a 25 m range. Field-of-view had a larger effect on estimated system avoidance capabilities with a ±10° FOV estimated to avoid 46-47% of collisions compared to 91-92% for a ±90°FOV sensor. The system was able to avoid a greater percentage of cases in which the vehicle was traveling straight. Among the unavoided crashes with a sensor FOV of ±90°, the average impact velocity using a 100 m range sensor was 7.4 m/s which was 3.1 m/s lower than a 25 m range sensor. Sensor ranges above 25 m were not found to significantly affect estimated crash avoidance potential, but had a small effect on impact mitigation. Sensor FOV had a larger effect on crash avoidance up to a FOV of ±60° with little additional benefit at larger FOVs. .
Haus, SH, Sherony, R, Gabler, HC, "Differential benefit of sensor system field-of-view and range in pedestrian automated emergency braking systems." AAAM Annual Conference. 2021. Remote.