

Automatic Emergency Braking Sensor Guidelines for Real-World Cross-Centerline Events
Abstract
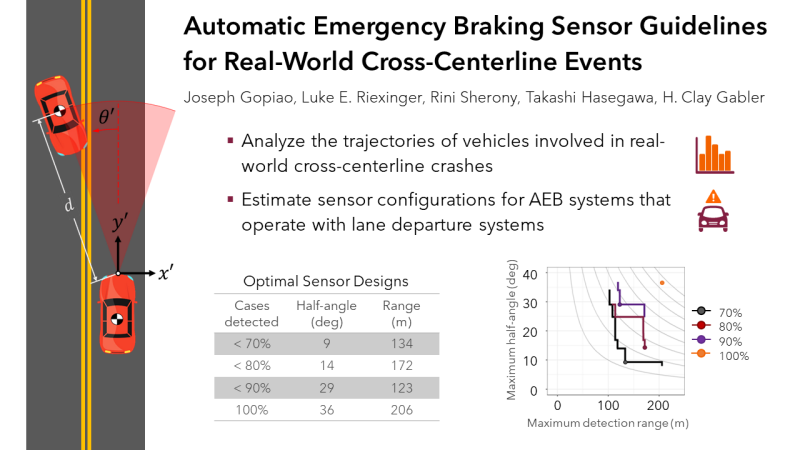
According to the National Highway Traffic Safety Administration (NHTSA), cross-centerline collisions represent 10.9% of crash fatalities despite comprising only 2.7% of police-reported crashes [1]. Implementing active safety systems can help prevent these crashes by utilizing sensors to track lane position and/or other vehicles. Although significant improvements have been made in the field of autonomous vehicles and advanced driver assistance systems, selecting the proper sensors that can reliably detect oncoming vehicles in time is still a large challenge. This study analyzes the trajectories of vehicles involved in real-world, cross-centerline crashes and estimates forward-facing sensor configurations for automatic emergency braking systems that operate in conjunction with lane departure systems.
A total of 111 crashes was selected from the National Automotive Sampling System / Crashworthiness Data System (NASS/CDS). The kinematics of each vehicle were reconstructed and simulated using crash scene diagrams and pre-crash data from event data recorders. The vehicle trajectories were transformed to a coordinate system relative to a simulated front-facing sensor mounted on the subject vehicle, and the sensor range, half-angle, and time-to-collision were calculated for each trajectory point. Finally, a sensor cost function was defined as the product of the maximum range and half-angle for each crash, and the optimized designs were calculated as the minimum cost that could detect a certain threshold of cases.
It was determined that a sensor with a 9-degree half-angle and a 134-meter range is optimal for detecting 70% of cases; a sensor with a 14-degree half-angle and a 172-meter range is optimal for detecting 80% of cases; a 29-degree half-angle and a 123-meter range is optimal for detecting 90% of all cases; and a sensor with a 36-degree half-angle and a 206-meter range can capture all cases.
This research informs the design of integrated safety systems by presenting a novel and objective method for estimating optimal sensor specifications. Optimizing the sensor design of a cross-centerline avoidance system is beneficial for manufacturers and road users alike because optimization can potentially reduce the cost of implementing the system while maintaining its effectiveness, making it more accessible and preserving more lives.
Gopiao J, Sherony R, Hasegawa T, Riexinger LE, Gabler HC. “Automatic Emergency Braking Sensor Guidelines for Real-World Cross-Centerline Events", 66th Annual Proceedings of the Association for the Advancement of Automotive Medicine, Student Symposium, Portland, Oregon. (October 2022).